グループミーティング10-17
Segment Anythingの作動方式:
- bounding-box
- 単独の"点"
- テキストプロンプト
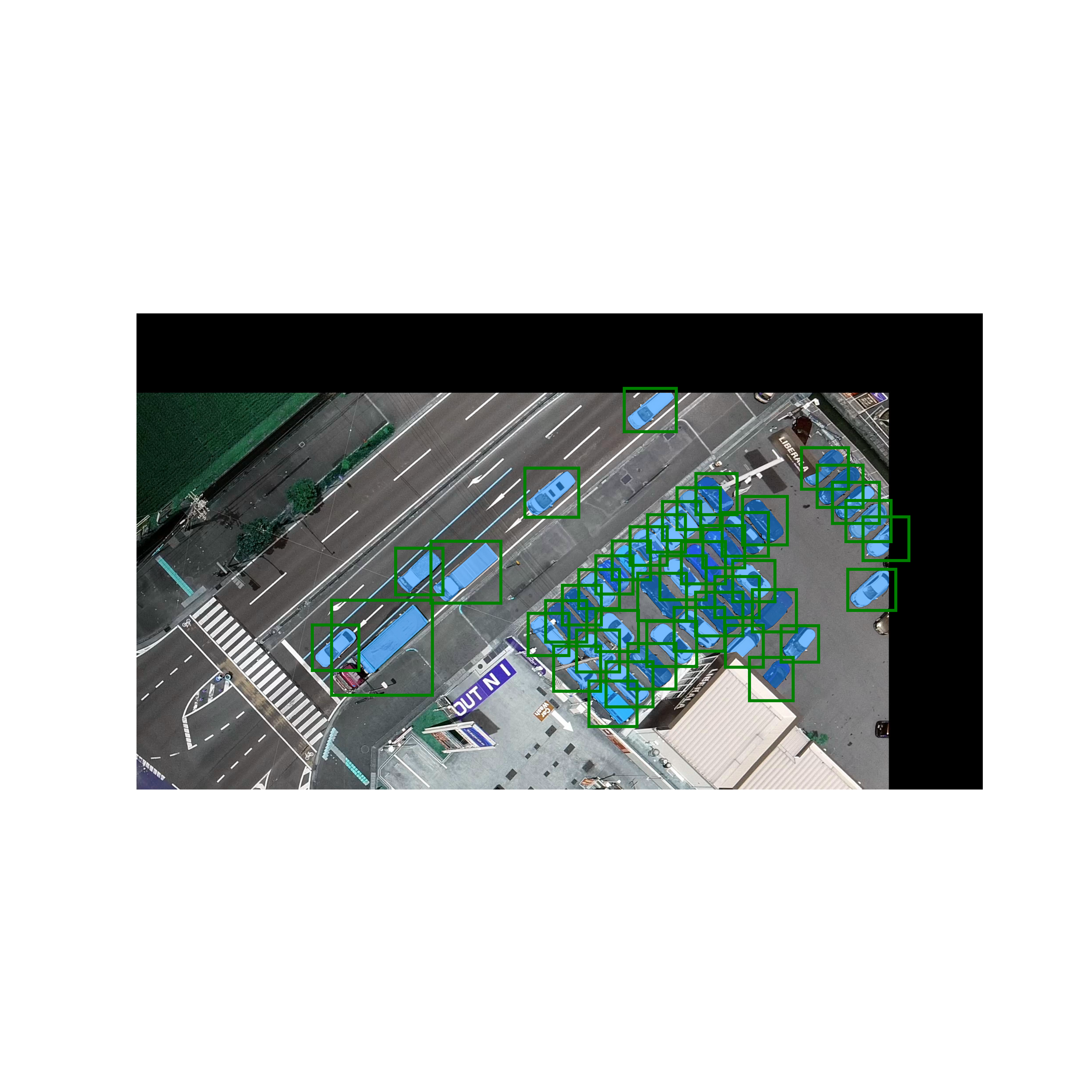
すなわち、車の位置情報をsegment anythingに提供
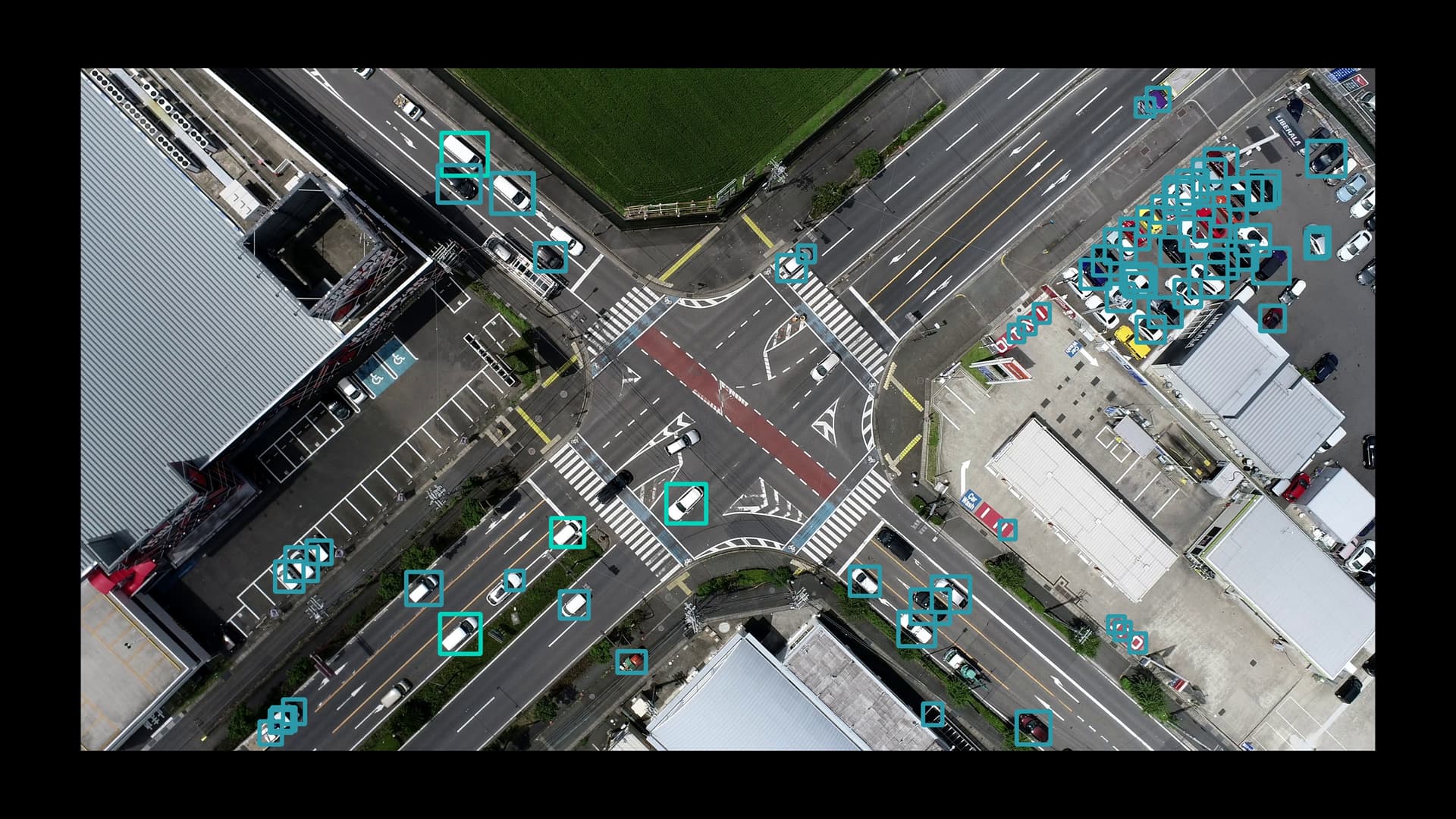
今使ったのはbounding-box、精度は
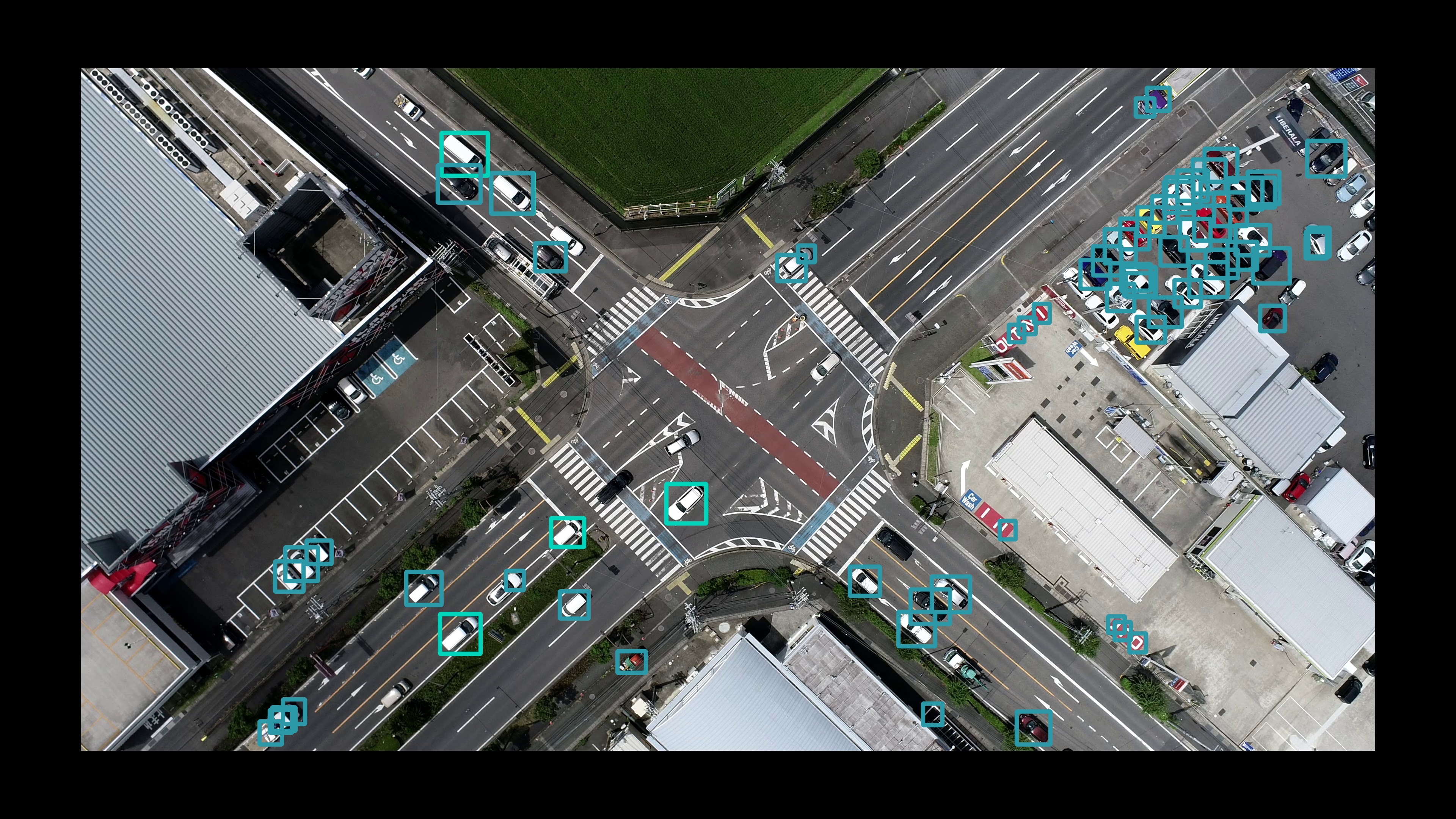
bounding-boxはちょっとずれたら問題もない、boxの中心は車上なら、中心の座標をつかって、単独の点にとしてsegment anythingを提供
問題は
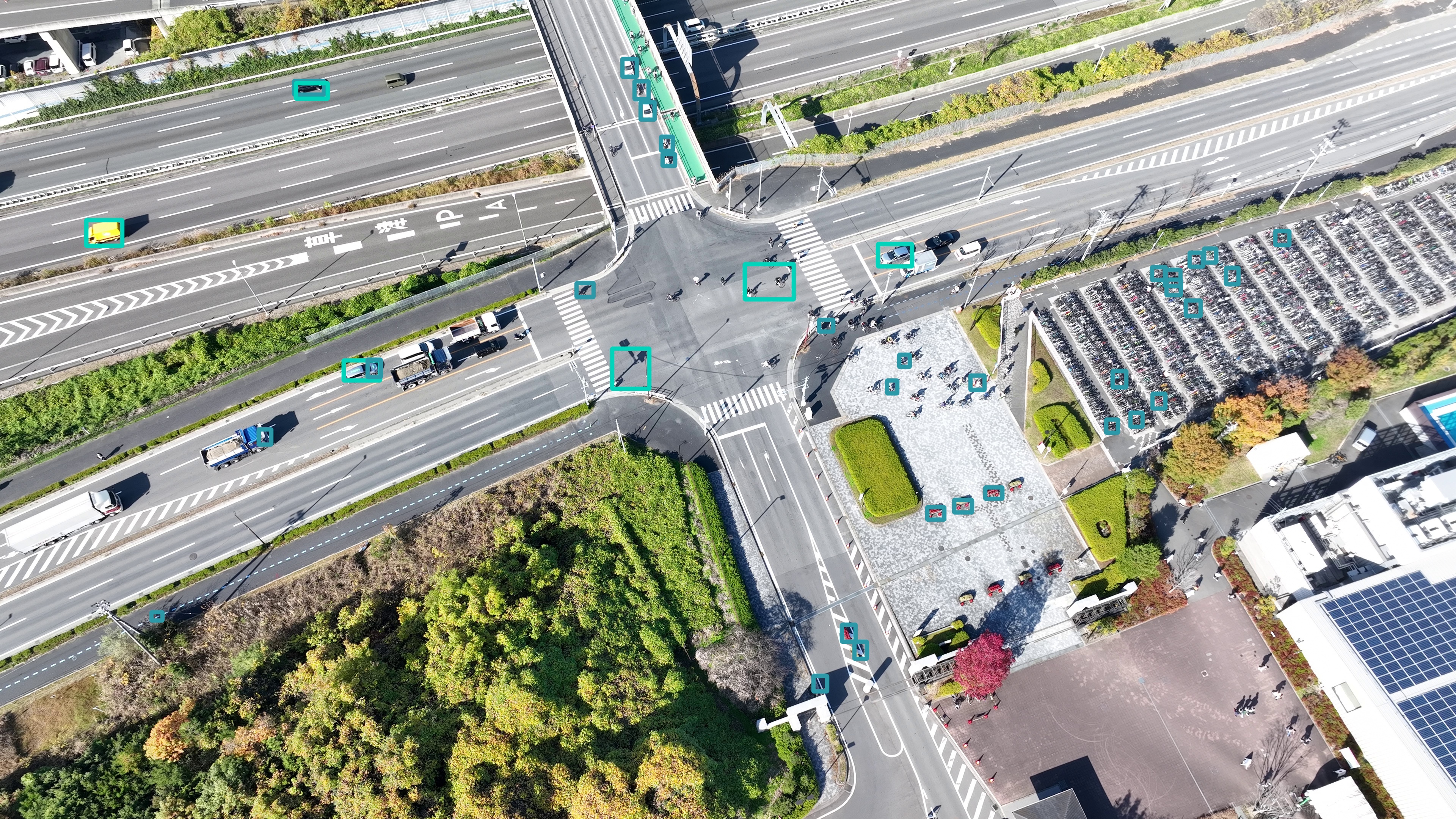
- 精度はまだまだ
- 精度はドローン映像の質など色んな条件による(汎用性)

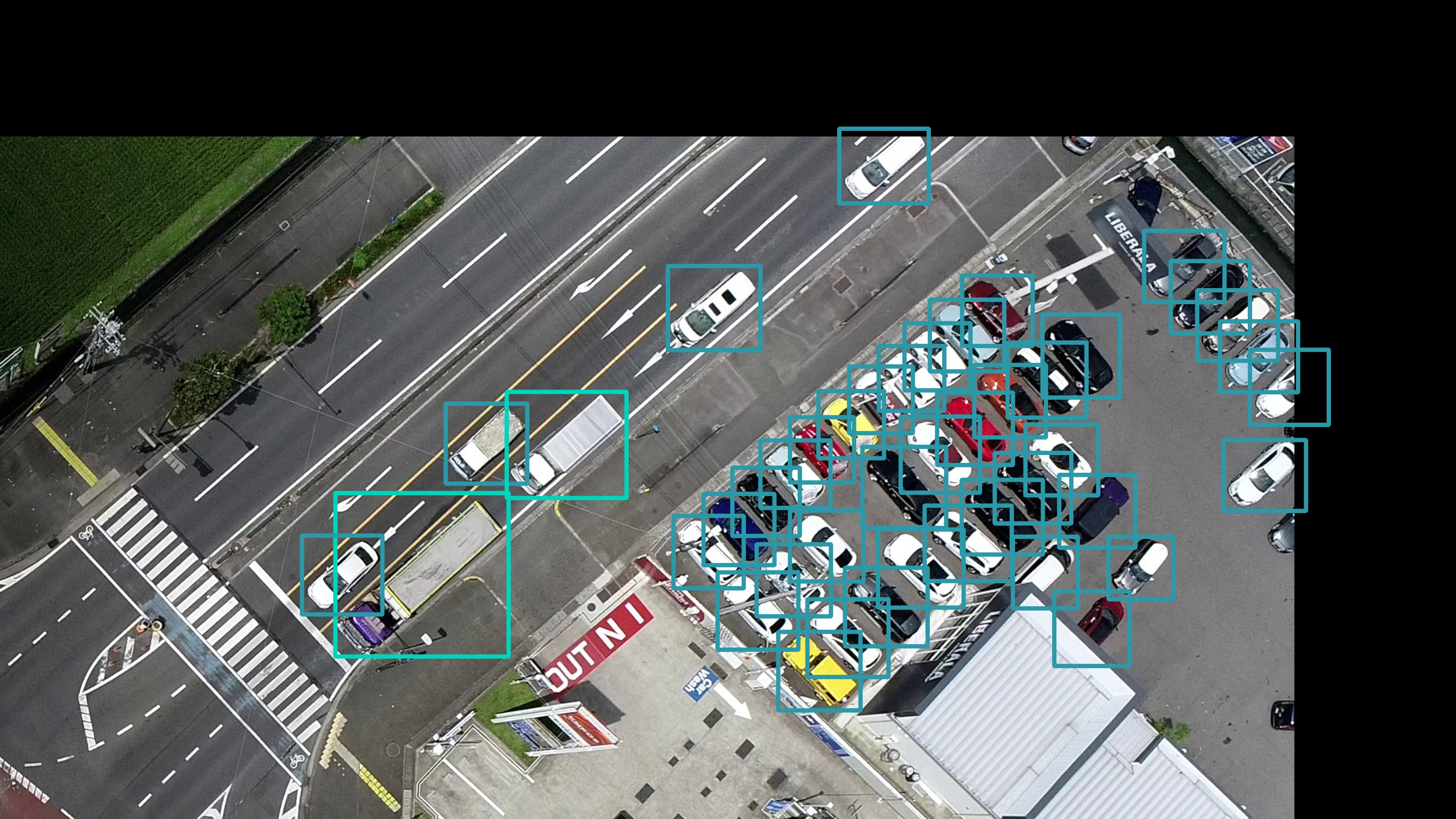
もう確定した精度が上がる方法
- よりいいpretrained modelを使う
- 画像を拡大などの画像処理
可能な解決策
- ドローンに撮った、道の上の車のデータセットを使う(今は衛星(飛行機?)に撮った、半分以上は道の上じゃないデータセットを使っています)
- 自分にいくつのラベルを作る
来週は
- segment anythingを実装
- コードを整理
10.25
Two problems:
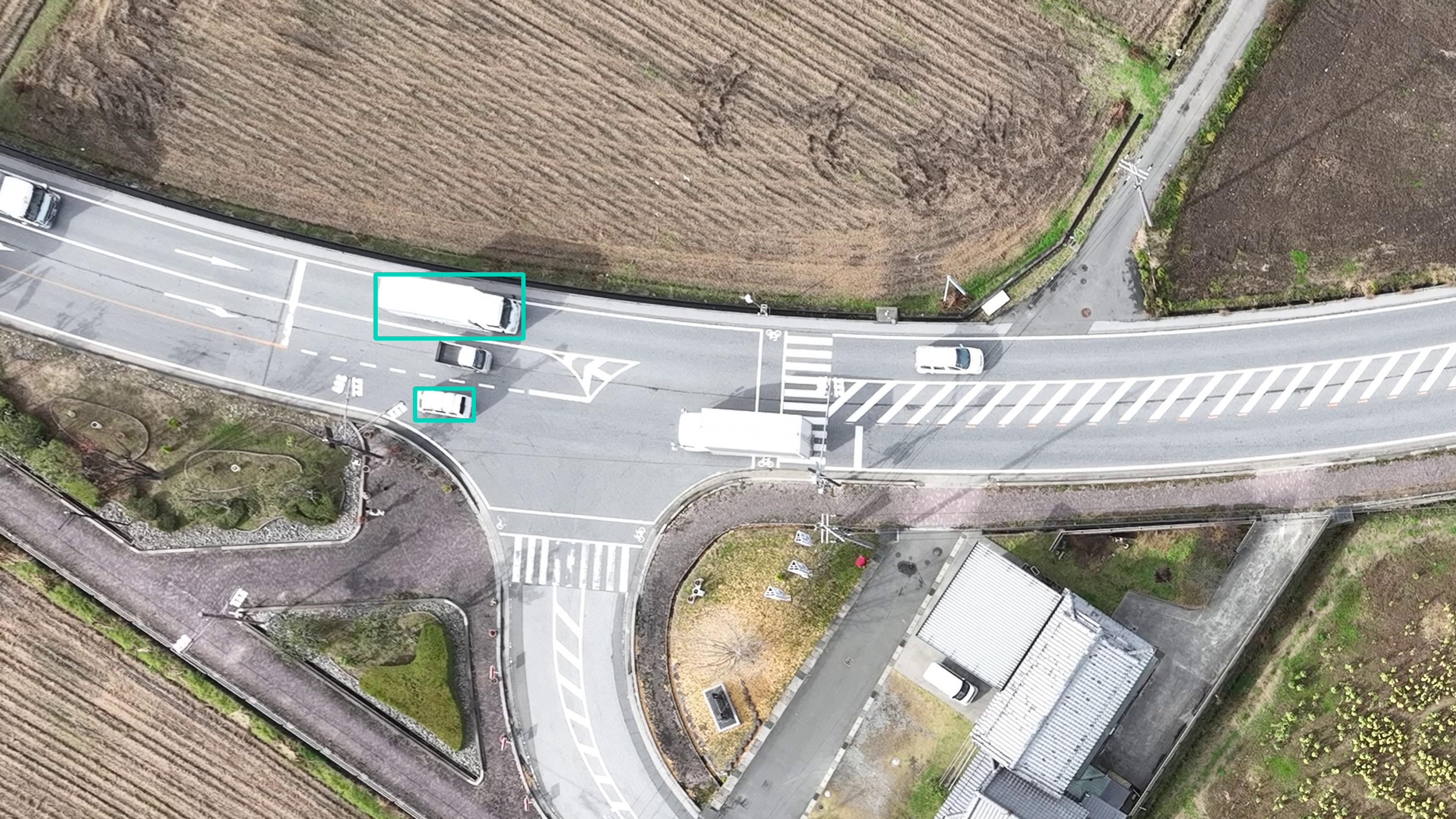
- Segment the body and head
- How to segment the whole image instead of a part of it in high accurancy
Solution:
- 转换成灰度图像会怎么样?总之还是得多试一试
- 大型货车一定要取两个mask,如果这两个mask重叠?
- 车头和车身肯定在车的两头,那么就可以取前后两个点,车头一定更小,所以小的mask就是车头